questions les plus fréquemment posées
Est-il nécessaire de disposer d'un positionneur DGPS ?
Pourquoi dois-je régler mon GPS en WGS84 ?
Quelles sont les différences avec de vrais levés hydrographiques ?
Quelles sont les limites liées à l'usage d'un sondeur monofaisceau classique ?
Peut-on installer Olex sur un PC avec un autre logiciel de navigation ?
Peut-on convertir des plans de pêche issus d'un autre système de navigation au format Olex ?
Olex
Est-il nécessaire de disposer d'un positionneur DGPS ?
Depuis le 1er mai 2000, les autorités des Etats Unis ont décidé de ne plus mettre en oeuvre le dispositif de disponibilité sélective (S.A.: Selective Availability), autrement dit, la dégradation volontaire de précision du GPS; cette disposition serait programmée jusqu'en 2006, avec confirmation annuelle de reconduction. Cette situation améliore de façon sensible les résultats obtenus dans le calcul du point dans le service standard SPS (Standard Positionning Service) grand public ou code C/A (Coarse Acquisition). La précision théorique, initialement annoncée pour le système dans cette situation, était de 30 m. Aucun chiffre officiel de performance à 95% n'a pour l'instant été publié. Dans la plupart des cas, on rejoindra vraisemblablement des précisions de positionnement allant de 5m à 60 m au lieu des 20 à 160 m antérieurement.
Néanmoins, les premières observations montrent des écarts inférieurs à 10 m dans de bonnes conditions de réception et avec une configuration géométrique idéale des satellites reçus. Il faut tout de même rester prudent sur l'utilisation des résultats, certaines situations entraînant une dégradation du point obtenu, que les raisons soient dépendantes (mauvais fonctionnement et incohérence d'un satellite, dégradation volontaire) ou indépendantes du système (retards de propagation dans l'atmosphère, pertubation locale, masquage, latitudes élevées...)
Un GPS différentiel (DGPS) dont la précision est de 1 à 5 mètres conserve donc tout son intérêt pour l'exploitation d'un positionnement de qualité en permettant une précision accrue, mais donne surtout la garantie que toute anomalie est corrigée en toutes circonstances.
Voir les infos sur le DGPS sur le site Furuno
Note : Septembre 2001
Dans le cadre de la mise en place du GNSS Européen, depuis le 1er septembre 2001, les fréquences des stations DGPS françaises ont été modifiées : il est important d'en tenir compte si vous êtes possesseur d'un GPS différentiel (voir avec votre revendeur)
--> voir Actualités GPS : SHOM et MLR Thalés
Statistiques sur les performances GPS de 2001 à 2005 : Air Force Space Command
A propos de la précision du GPS : David L. Wilson
Pourquoi dois-je régler mon GPS en WGS84 ?
La cartographie électronique utilisée par Olex est issue du fabricant C-Map. Toutes les cartes sont référencées dans le système géodésique choisi par l'I.H.O. pour la nouvelle norme ECDIS de cartes vectorielles S57 v.3, norme adoptée par le S.H.O.M. pour l'élaboration des cartes électroniques de navigation (ENC).
- Le GPS fournit normalement des positions dans le référenciel WGS84.
- Il est nécessaire, dans ce cas, de corriger ces positions pour les porter sur les cartes référencées dans un autre système géodésique.
- Le SHOM recommende d'utiliser les décalages fournis dans le titre de la carte, plutôt que les possibilités de conversion intégrées dans certains récepteurs GPS.
- Le SHOM prépare le passage progressif de toutes les cartes dans le système géodésique WGS84, afin qu'elles soient exploitables sans correction avec les systèmes de navigation modernes.
Les systèmes géodésiques
Voir Lettre du SHOM : Lettre no 16, décembre 1999 : Cartes marines et systèmes géodésiques
Un système géodésique est un système d'axes x,y,z qui permet de repérer les coordonnées de tout point de la Terre. Ce repère est rendu accessible aux utilisateurs à partir d'un réseau de points matériels positionnés à la surface de la Terre ou plus récemment à partir de la connaissance de la position des satellites dans l'espace (par exemple ceux du système GPS). Chacun peut déterminer sa position dans ce système, connaissant la position de points ou de satellites, par mesures d'angles ou de distances (triangulation, trilatération).
Il existe de nombreux systèmes géodésiques. En France, la Nouvelle Triangulation de la France (NTF) est le système géodésique officiel dans lequel doivent être exprimés tous les travaux de topographie et d'hydrographie côtière. Ce système sera prochainement remplacé par le Réseau Géodésique Français (RGF), équivalent au WGS84 pour les applications de navigation. Or, pour la publication des cartes marines de métropole, le SHOM avait adopté le système géodésique ED50, utilisable sur tout le continent européen.
Cartes marines et GPS
Quelles sont les différences avec de vrais levés hydrographiques ?
Il est évident que la qualité des résultats produits grâce au système Olex reste entièrement tributaire de la qualité des informations issues des capteurs de mesures de position et de sonde.
Utilisé avec des capteurs classiques (tels qu'utilisés à la pêche par exemple), Olex n'aura pas la prétention de produire des cartes de bathymétrie capables de rivaliser avec des systèmes de mesures obtenues à l'aide de levés hydrographiques rigoureusement contrôlés. En effet, les données bathymétriques ne peuvent être évaluées sur le plan de la qualité que si l'on dispose des paramètres ayant servi à leur détermination. L'OHI publie des normes de précision pour la mesure des profondeurs ( IHO Standards for Hydrographic Surveys and Classification Criteria for Deep Sea Soundings, Organisation internationale hydrographique, publication spéciale No 44 .).
- Club Dali : Recommandations pour la conduite d'un levé bathymétrique réalisé dans le domaine portuaire, côtier ou fluvial
- SHOM : L'hydrographie, les documents nautiques, leurs imperfections et leur bon usage
En particulier, les utilisateurs d'Olex ne sont souvent équipés que de sondeurs classiques , non stabilisés, et ne répondant pas à ces normes contrairement aux Services Hydrographiques dotés de sondeurs spécialisés. Or, la stabilité du transducteur de mesure (le navire) est essentielle, étant donné que tout mouvement change la position sur les fonds marins. à partir de laquelle la réflexion est reçue. De plus, bien que les progrès aient été faits depuis ces dernières années, la propagation des signaux acoustiques à travers l'eau de mer reste soumise à des erreurs dues à la réfraction des signaux de sortie. De même, les mesures subissent l'influence de facteurs tels que la densité et la salinité de l'eau à travers laquelle le signal se propage, ainsi que la fréquence et donc la largeur de bande du signal acoustique. La précision globale de la bathymétrie établie à l'aide de ces données est donc aussi fonction de l'espacement dans le temps entre les profils effectués.
De plus, les levés hydrographiques sont effectués en suivant des lignes préétablies le long desquelles le bâtiment hydrographique fait route. La distance entre les lignes varie selon la complexité du fond : ainsi dans les zones dangeureuses, une couverture bathymétrique totale sera établie. Ces levés sont maintenant réalisés au sondeur multifaisceau permettant d'accroître la résolution des mesures.
De même, les hydrographeurs afin d'examiner les données des marées et les fluctuations du niveau d'eau installent des marégraphes ou limnigraphes. Pour les zones côtières, l'usage de GPS cinématique ayant une précision de positionnement centimètrique, permet aussi de récupérer une information d'altitude Z trés précise, ce qui donne la possibilité de s'affranchir des calculs de marées.
Néanmoins, l'expérience acquise avec les utilisateurs d'Olex a montré que les techniques de filtrage mises en oeuvre pendant l'acquisition simple des données position et sonde s'avèrent trés performantes pour éliminer les valeurs douteuses dues à l'état de la mer et à la stabilité du sondeur. Le chevauchement des secteurs parcourus par les navires et donc la multiplication des profils réalisés réduit les limites des interpolations pour représenter la morphologie des fonds marins. Des comparaisons faites sur des zones cartographiées par les Services Hydrographiques de manière précise au SMF -sondeur multifaisceaux- montrent que le résultat de l'exploitation cartographique des données diffère peu de celui des données issues de sondeurs verticaux traitées par le système Olex.
En conclusion, le système Olex s'avère trés efficace pour la plupart des applications (pêche commerciale, hydrographie légére) nécessitant la mise en oeuvre de moyens simples d'acquisition et un minimum d'investissement humain (formation rapide) grâce à son concept simple et automatique.
Extrait de l'article de M. Patrick Michaux paru dans la Lettre du S.H.O.M. :
. Lettre no 17, décembre 2000 : Du sondeur vertical au sondeur multifaisceaux
- Les écho-sondeurs classiques dits verticaux ou monfaisceaux équipent la plupart des bateaux. Ces sondeurs ont longtemps été le seul moyen acoustique disponible, permettant aux hydrographes de mesurer la profondeur en vue d'établir les documents d'aide à la navigation de surface ou sous-marine. Aujourd'hui encore, certains navires hydrographiques et la plupart des embarcations hydrographiques de petites dimensions en service au SHOM mettent en oeuvre des sondeurs de ce type.
- Ces appareils mesurent la profondeur à la verticale du navire le long de la route suivie, aux moyens d'ondes sonores, en mesurant le temps de propagation aller-retour d'une onde acoustique entre la sonde et le fond. La connaissance de la valeur moyenne de la célérité du son dans l'eau et éventuellement du cap du navire permet d'en déduire la distance entre le fond et le navire, c'est à dire la profondeur.
- Le sondeur vertical émet une onde qui peut être assimilée à un cône d'ouverture importante (15 à 30 degrés en général). Par conséquent, la résolution de ce sondeur demeure donc assez faible : la surface 'insonifiée" au fond est d'autant plus importante que l'ouverture du cône est grande et que la profondeur est importante.
- De plus, la connaissance des caratéristiques acoustiques du milieu est primordiale : en effet, les faisceaux non verticaux du sondeur ne se propagent pas en ligne droite, ni à vitesse constante, si le volume d'eau traversé n'est pas homogéne en température et salinité. Ces paramètres peuvent être modifiés par la présence de masses d'eau diverses (eau douce en estuaire...)
- De même, l'attitude du navire porteur (roulis, tangage, pilonnement, cap) doit être connue avec exactitude afin de positionner convenablement les sondes mesurées. Ainsi, les navires aussi petits soient-ils, doivent être équipés de centrales inertielles précises et de systèmes de mesure de la célérité du son dans l'eau.
Quelles sont les limites liées à l'usage d'un sondeur monofaisceau classique ?
Comme nous l'avons entrevu dans le paragraphe précédent, la technologie des sondages monofaisceau utilisant des sondeurs classiques (comme dans le secteur de la pêche professionnelle) présente en effet des limites importantes :
(d'après certaines informations fournies par M. Xavier Lurton d'Ifremer)
voir aussi cours théorique sur la détermination de la profondeur du SHOM (en anglais)
- ce type de sondeurs propose un faisceau relativement large
Un sondeur monofaisceau émet verticalement sous le navire un signal bref dans un faisceau de forme conique, concentrant ainsi l'énergie du signal transmis sur une zone circulaire au fond de la mer. Il mesure le temps de trajet aller-retour du signal, ce qui donne une valeur de la hauteur d’eau.
 |
Ainsi, il est important de considérer la zone éclairée instantanément par le faisceau. Dans le cas qu'il nous intéresse (sondeurs type pêche), elle se caractérise par l'interception du faisceau par le fond, qui est limitée soit par l'ouverture angulaire soit par la durée du signal. Généralement, la durée du signal est assez courte (de l'ordre de la milliseconde) pour permettre une résolution acceptable : moins par petits fonds pour améliorer la résolution, et plus en très grands fonds pour augmenter la puissance acoustique instantanée disponible en réception.
Mais la plupart des transducteurs couramment utilisés en pêche produisent un signal acoustique dans un cône d'angle large allant de 7° (sonde monofréquence) jusqu'à 45° (bifréquence) en 50KHz et de 7° (monofréquence) à 15° (bifréquence) en 200 KHz (à -3dB). Note : avec des sondeurs spécialisés pour l'hydrographie, on trouve des largeurs de faisceau beaucoup plus fines (3 à 5°). Par exemple, Airmar le principal fournisseur de transducteurs pour la plupart des fabricants de sondeur propose une gamme complète s'adaptant à toute application et à tous les prix.
 |
|
|
Le diamètre de cette zone insonifiée est bien évidemment aussi dépendante de la profondeur : plus on a de profondeur, plus la surface de la zone insonifiée est bien évidemment importante.
Une simple application du théorème de Pythagore permet de calculer le diamètre de cette zone insonifiée :
Résolution horizontale=2*Profondeur*Tangente(angle conique/2)
Un sondeur équipé d'une sonde d'ouverture de faisceau de 15° aura donc une résolution horizontale de :
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Question :
dans le cas de sondes par grands fonds (type 1000 mètres), la mesure de profondeur affichée par le sondeur est-elle crédible pour des relevés bathymétriques ?
A titre d'exemple, pour un sondeur 'grand fond' de fréquence 28kHz, de puissance égale à plusieurs kW, on peut trouver des transducteurs ayant une largeur de faisceau fine de 7°. Pour une profondeur de 1000 mètres, on obtient alors une zone insonifiée sur le fond de la mer de 122 mètres de diamètre soit une surface de près de 12000 m2 c'est à dire équivalente à 2 terrains de football. Cependant, malgré ces limitations, l'expérience montre que des résultats assez surprenants : les résultats obtenus avec des sondeurs 'grands fonds' bien que grossiers peuvent en effet être comparés avec les levés bathymétriques réalisés avec des sondeurs multifaisceaux. Certains capitaines de navire de pêche ont pu constater de manière pratique l'intérêt d'utiliser Olex pour pallier à la carence d'informations de bathymétrie des cartes officielles de navigation et améliorer la visualisation des fonds sur ce type de zone.
--> voir le travail du chalutier 'Drake' sur certaines terrasses en Ouest Irlande et les travaux de la 'Thalassa' sur les mêmes zones avec du multifaisceau
Le choix du transducteur présentant des caractéristiques de faisceau étroit est donc trés important pour des applications de bathymétrie. De même, pour des applications de type pêche, un autre paramètre sera mis en valeur : la détection de poisson. Plus le faisceau sera fin, plus la détection de cible sera précise. En effet, la résolution dans le plan horizontal est liée à la largeur angulaire du faisceau; pour être séparables, deux cibles devront être au moins distantes de la largeur du faisceau à l'immersion considérée.
- le sondeur a tendance à mesurer le temps de propagation le plus faible de l'écho
En effet, le sondeur n'ayant aucune capacité de dicrimination angulaire, il recevra en premier l'écho du point le plus proche compris dans le faisceau, qui peut être très différent de la sonde à la verticale de la position du bateau. Par conséquent, la valeur affichée et donc accessible en sortie NMEA pour un système comme Olex est bien la valeur minimale de la sonde mesurée, donc le début de l'écho (contrairement à d'autres sondeurs intégrant une moyenne des échantillons temporels de l'écho). Ceci s'explique aussi pour des raisons de sécurité : en donnant une mesure du point le plus haut, on informe le naviguant sur les dangers possibles pour éviter au bateau de talonner.
 |
 |
|
signal reçu = copie atténuée du signal émis |
signal reçu plus long avec des fronts de montée et de descente plus lents l'information de profondeur donnée par le sondeur est la sonde au point A plutôt que la profondeur selon l'axe vertical du transducteur |
De plus, la distance oblique au sondeur changeant au cours de l'avancée du bateau, la forme de l'écho enregistré au cours du temps sera parabolique. (voir l'imagerie des détections de poissons sur l'échogramme temporel en forme de croissant bien caractéristiques)
Ainsi, la technique de relevés bathymétriques par sondeur monofaisceau comporte donc des limitations dues à sa médiocre résolution spatiale horizontale. On constate par exemple que le relevé du relief du fond avec un monofaisceau est soumis à de nombreux artefacts.
 |
 |
 |
|
creux dont la largeur est inférieure à celle du faisceau |
creux dont la largeur est supérieure à celle du faisceau |
pic ou sommet de relief |
|
mais allongement de la traînée temporelle de l'écho (difficile à interpréter) |
mais largeur sous-estimée |
mais sa forme précise peut être modifiée par le phénomène d'hyperbole |
Les solutions pour améliorer ces problèmes :
La structure même du sondeur monofaisceau, qui n'a pas de possibilité de discrimination transversale à l'intérieur de son faisceau, rend ces phénomènes irrémédiables. Cependant, certaines améliorations existent en utilisant une autre technologie. En divisant la face émissive du transducteur en plusieurs secteurs, on peut créer artificiellement plusieurs faisceaux, visualisant tous la cible prise dans le faisceau principal; la mesure du déphasage entre ces faisceaux secondaires permet de positionner la cible dans le plan horizontal. Ce procédé appelé Split-Beam est mis en oeuvre sur de nouveaux sondeurs qui ne sont plus l'apanage des navires de recherche halieutique. Ces sondeurs s'avèrent ainsi plus efficaces pour visualiser les fonds ainsi que pour localiser des poissons isolés et mesurer correctement leur indice de cible.
Olex est le premier système sur le marché à tirer profit de ce nouveau type de sondeur numérique à technologie Split Beam : ce qui permet une meilleure résolution des mesures, un géo-référencement de l'échogramme du sondeur sur la carte de navigation et une indication de la nature du fond. (voir chapitre sur : Option échogramme et dureté du fond )
Comment remédier au problèmes de calibration de la valeur du son dans l'eau selon les facteurs de température et la salinité ?
La vitesse de propagation du son dans l’eau dépend de la température, de la salinité et de la profondeur.
Ainsi le sondeur produit des valeurs de sonde erronées si l’on ne prête pas attention à ce phénomène.
Ex. :
- à 0°C la célérité du son dans l’eau distillée est de 1482 m/s, dans de l’eau de mer à 3,5% de salinité elle est de 1522 m/s
- on dit que la vitesse du son dans l’eau décroît de 2,4 m/s par degré Celsius
exemple de formule : c (en m/s) = 1403 + 4,9t – 0,05t2 + 0,16p
avec t (température en °C) et p (pression en bars)
Pour cette raison, il est nécessaire de mesurer la vitesse du son dans l’eau selon les conditions ou du moins d'en donner une approximation la plus fine possible afin de corriger la valeur de la sonde acquise.
La plupart des navires ne possédant pas de capteurs de mesure de vitesse du son dans la colonne d’eau (profiler) ainsi que de capteurs de salinité (CTD), les vitesses de son peuvent être évaluées à partir de différentes équations (équation de Coppens par exemple).
Voir lien Web pour un calcul en ligne sur le site du Laboratoire National Britannique de Mesures ou le document pdf associé 'Détermination de la vitesse du son dans l'eau'
 |
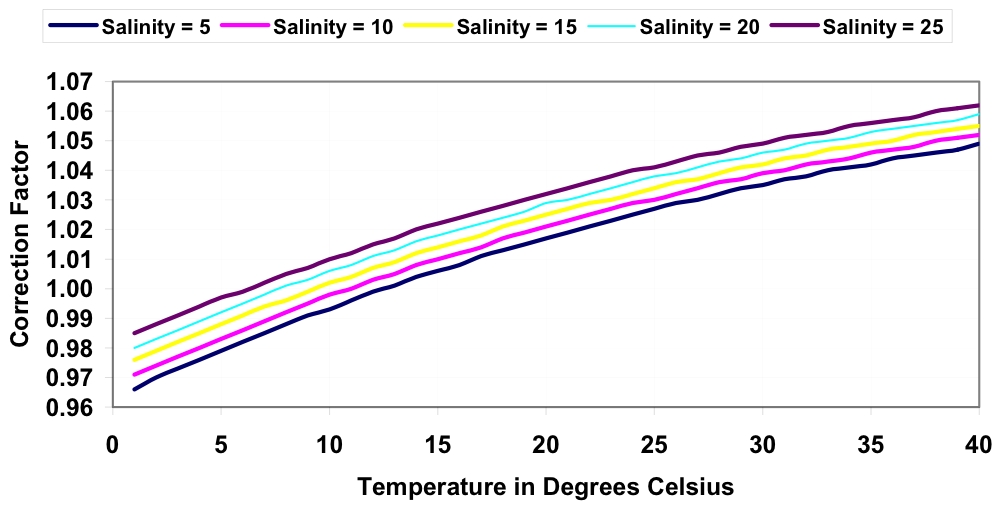 |
Olex peut pondérer de manière linéaire la valeur de sonde mesurée par un pourcentage de correction dépendant de la différence entre 1500 et la valeur V donnée par l’utilisateur (en phase avec celle utilisée par le sondeur) :
Profondeur corrigée = profondeur acquise - (1500 - V) / 15
Ex. : si l’utilisateur entre 1470, la valeur de la sonde mesurée sera corrigée, soit une valeur de profondeur enregistrée 2% plus faible soit 0.667 % par tranche de 10 m/s)
Note : pas de modification de la valeur de sonde mesurée dans le cas de la configuration par défaut soit 1500 m/s
Cette fonction permet pour des opérations d’import/export de sondes mesurées avec des paramètres de vitesse de son différents de niveler les données avec une calibration moyenne de 1500 m/s.
Peut-on installer Olex sur un PC avec un autre logiciel de navigation ?
A ce jour, presque tous les bateaux de pêche sont équipés d'un ordinateur de bord avec un logiciel de navigation X ou Y. Devant le rôle vital joué par cet appareil à bord, l'acquisition d'un second PC servant de secours en cas de problème sur le premier système s'effectue de plus en plus fréquemment. Or certains utilisateurs qui ont utilisé et adopté depuis des années un premier traceur de route sont un peu réticents lorsqu'il s'agit d'adopter un système différent car cela leur demande un effort pour se former au nouvel outil et changer leurs habitudes.
"Même si l'on admet qu'Olex est un système à la fois plus simple, plus fiable et plus puissant que ses concurrents, il est difficile de changer ses habitudes quotidiennes et de travailler dans un environnement nouveau qu'on ne connaît pas" avouent certains patrons intéréssés par le concept et les fonctionnalités propres à Olex.
"Les utilisateurs tiennent à garder leurs habitudes et se sentent perdus avec un nouveau programme", soulignent de leur côté certains revendeurs d'électronique de marine.
Aussi, comment se donner la possibilité d'essayer "autre chose" en passant à Olex tout en évitant d'heurter les mentalités ? Au lieu d'acquérir -en doublon- le même logiciel utilisé habituellement, pourquoi ne pas faire l'acquisition d'un logiciel différent amenant une valeur ajoutée certaine ? Entre les performances apportées par Olex et les habitudes des utilisateurs, certains ont choisi de ne pas choisir. C'est ainsi que des clients ont adopté la méthode de travail suivante, alliant sécurité et innovation.
L'ordinateur peut être configuré pour tourner sous Windows ou sous Linux afin de permettre aux utilisateurs d'adopter progressivement Olex et de goûter à ses nombreux avantages. En l'occurrence, le second ordinateur en passerelle est configuré en "double boot", c'est à dire que l'utilisateur peut par défaut démarrer son PC sous Linux pour utiliser le système Olex mais peut aussi choisir de partir sous Windows pour utiliser un autre logiciel de navigation. Installer ces deux systèmes sur la même machine ne pose aucun problème en terme de performance : néanmoins, il est conseillé d'utiliser les services d'un installateur Linux qualifié pour sa mise en oeuvre technique (nous contacter pour plus d'informations)
En effet, contrairement aux autres systèmes de navigation fonctionnant sous Microsoft Windows,
- Olex fonctionne sous un environnement différent : Linux
- de plus, Olex n'utilise pas de clé électronique (ou dongle) pour sa protection contre la copie illégale mais seulement une clé logicielle (code)
Par conséquent, il est possible d'utiliser son PC sans risque, pour héberger de manière complètement indépendante 2 logiciels d'aide à la navigation distincts fonctionnant chacun sous 2 systèmes d'exploitation différents. Ceci s'effectue simplement par un partage du disque dur interne en deux parties : une partition Windows et une partition Linux.
Note technique : le partage du disque dur interne est préférable car l'installation respective sur 2 disques durs indépendants n'est pas possible pour le moment. De plus, en pratique, il est nécessaire d'effectuer une installation de Windows avant de procéder à celle de Linux. Il faut donc y penser dès le départ afin d'éviter une ré-installation complète de tout le système. On peut alors installer une copie de sauvegarde du logiciel de navigation et des plans de pêche présents sur le premier PC dans la partition prévue à cet effet du disque dur du second PC abritant Olex.
Certains de nos clients utilisant depuis des années un autre traceur de route ont en effet acquis Olex en second système complémentaire. Ce dernier est utilisé avant tout pour la génération automatique de cartes de bathymétrie en temps réel car il dispose à ce jour, par rapport à ses concurrents, de caractéristiques inégalées en termes de puissance et de performances. Cependant en cas de crash sur le premier PC de navigation installé à bord, l'utilisateur aura le choix avec le second PC :
- de continuer à utiliser Olex et ses propres outils de navigation, de saisie de marques personnelles (dans le cas où les plans de pêche ont été aussi créés et tenus à jour)
- dans le cas contraire (ou lorsque Olex a été installé depuis peu de temps) , de redémarrer leur second PC pour lancer la copie de leur logiciel de navigation habituel afin de se retrouver dans la même configuration que sur le premier PC défectueux (après avoir bien entendu pris soin de déplacer physiquement le dongle de l'ordinateur en panne vers le second PC).
- Note : il est clair que dans les deux cas, un seul système est opérationnel et utilisable par le patron en même temps, le choix se faisant au démarrage du PC.
Ainsi, la cohabitation peut s'avèrer une idée intéressante d'utilisation à bord; cette méthode garantissant aussi à l'utilisateur une migration douce vers le système Olex :
- en totale sécurité car les deux environnements de travail demeurent complétement indépendants et sans risque d'interférences entre les deux
- tout en garantissant un apprentissage progressif de toutes les fonctionnalités d'Olex. A ce titre, certains utilisateurs commencent à être conquis par la simplicité d'Olex dans des domaines autres que la bathymétrie temps réel et automatique comme par exemple la saisie des plans de pêche (sauvegarde automatique, pas de gestion de fichiers ou répertoire...). Et certains ont déjà décidé, après quelque temps, d'utiliser Olex comme premier traceur...
Peut-on convertir des plans de pêche issus d'un autre système de navigation au format Olex ?
Malgré l'amélioration de la qualité du positionnement GPS, nous avons constaté que certains utilisateurs restent frileux à l'idée d'utiliser leur nouveau système Olex pour ressaisir les plans de pêche de manière encore plus précise. Aussi, il est bien entendu possible de convertir des plans de pêche issus de divers systèmes informatiques de navigation au format Olex.
Cependant, M.I. Software ne conseille pas cette opération pour les raisons suivantes :
- la conversion des plans est relativement peu intéressante techniquement parlant (certaines données ayant été saisies avec un système de positionnement moins précis que le GPS actuel, d'autres avec un référentiel de géodésie inconnu...)
- de plus, elle s'avère trés coûteuse financièrement pour l'utilisateur
A titre de comparaison, il y a quelques années, on avait des traceurs vidéo avec une cartographie sommaire et des moyens de positionnement hyperboliques peu précis. Puis on est passé à une deuxième génération avec les traceurs de route de type informatique plus puissants, bénéficiant d'une cartographie, réplique des cartes papier officielles et d'un positionnement par satellite plus précis, nécessitant de refaire ses plans de pêche.
Maintenant avec le système Olex, on se retrouve avec une troisième génération disposant des cartes vectorielles au format international préconisé par les Services Hydrographiques et de la précision nouvelle du système de positionnement GPS permettant en outre de faire de la bathymétrie temps réel. Aussi, grâce à la simplicité de ses outils de saisie, Olex peut permettre à l'utilisateur de tirer profit de la nouvelle qualité du positionnement GPS afin de permettre le tri dans les informations saisies au cours des précédentes années de travail et ainsi mettre de nouveau à jour ses plans de pêche (voir paragraphe précédent).