2.0 Check-list pour l'installation du système Olex à bord
2.1 Source d'alimentation et interfaçages
Il est important pour l'ordinateur d'avoir une alimentation non interruptible. En effet, si l'ordinateur subit une coupure d'électricité alors qu'il est en train de calculer les reliefs des fonds, des données de sonde dans la région où s'exerce le calcul peuvent être perdues. Une manifestation évidente d'une coupure de jus est la présence de zones rectangulaires sans présence de données de profondeur, ceci à certains niveaux de zoom uniquement.
D'autre part lorsque l'ordinateur redémarre, il lance automatiquement une vérification du système de fichiers
Ainsi des coupures peuvent apparaître lors du transfert de courant du bord vers une source sur le quai par exemple.
La solution est alors d'installer un onduleur (UPS Uninterrupted Power Supply)
De même, pour éviter les parasitages ou phénomène de boucles de masse avec les instruments, il est conseillé d'isoler galvaniquement les instruments interfacés avec le PC à l'aide d'opto-coupleurs.
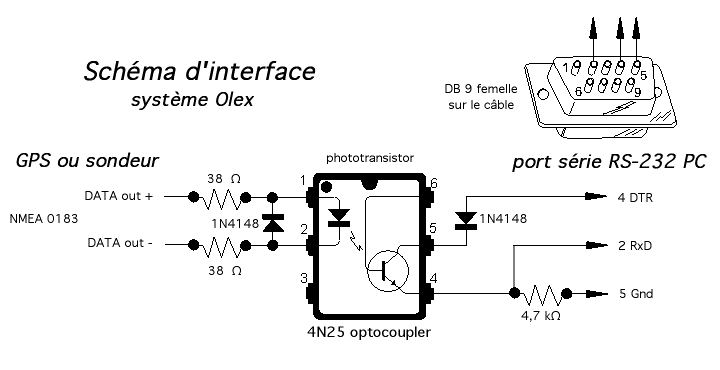
2.2 GPS
L'antenne du GPS doit être montée aussi bas que possible afin d'éviter les mouvements lorsque le navire se trouve dans des conditions de mer difficiles. A l'écran, de tels mouvements sont démontrés par des routes fonds instables et par conséquent par une vision de la carte aussi instable.
L'antenne du GPS devrait aussi être placée avec le maximum de vision dans toutes les directions.
Le GPS ou dGPS doit être réglé en géodésie WGS84 (datum) et envoyer obligatoirement les chaînes NMEA 0183 suivantes :
- $--GGA (position du navire et infos réception –qualité du signal hdop et nombre de satellites)
- $--RMC ou $--ZDA (date et heure pour le calcul des marées)
- $--VTG (cap et vitesse fond)
Notes :
- si l'information RMC et ZDA n'est pas disponible, Olex utilisera la date et l'heure réglée dans le BIOS du PC (dans ce cas, penser à vérifier si ces données sont correctes (heure en temps universel)
- en l'absence de données RMC ou VTG, le système calcule la vitesse sur le fond et la route fond à partir des positions géographiques successives.
2.3 Sondeur
le sondeur doit envoyer au choix les chaînes NMEA 0183 :
- $--DBT (profondeur sous le transducteur) ou
- $--DBS (sous la surface) ou
- $--DEP (sous la surface+offset surface immersion transducteur)
Important :
- s'il est impossible de régler le paramètre de distance entre la sonde et la surface de l'eau sur le sondeur, alors il faut choisir d'envoyer uniquement l'information DBT en réglant alors l'offset dans le logiciel Olex
- de même, il est conseillé d'ajuster la vitesse du son dans l'eau à 1500 m/s
Note : si le sondeur est équipé d'un capteur de température de l'eau, il doit envoyer les chaînes $--MTW (température de l'eau en degrés Celsius)
2.4 Autres interfaces possibles
2.4.1 Pilote automatique
- la chaîne $--RMB (données de navigation de la position actuelle à la destination d'un waypoint)
et la chaîne $--APB (status du waypoint, écart de route, cap initial du waypoint d'origine vers la destination, cap actuel entre la position actuelle et la destination et route à suivre)
sont envoyées vers le pilote à travers tous les ports série lorsque la fonction Pilote est activée.
2.4.2 Systèmes de positionnement acoustique sous-marin
2.4.2.1 Simrad HPR400
- la chaîne PSIMSSB contient l'information pour le suivi de la cible sous-marine
- la chaîne PSIMSNS contient l'information sur le cap vrai du bateau donnée par le gyro du HPR400
- la chaîne PSIMGPS est équivalente à GGA
2.4.2.2 ORE Trackpoint II
- la chaîne $PORE contient l'information pour le suivi de la cible sous-marine
2.4.3 Systèmes de positionnement de chalut
2.4.3.1 Simrad ITI
- les chaînes @IITPT (position géographique vraie du chalut) et @IITPR (profondeur du chalut sous la surface)
2.4.3.2 EBS Géonet
- la chaîne $PTSAL (distances horizontales, cap vrai et immersion des DAP)
2.4.4 Compas et gyro
- chaîne $--HDT (cap vrai géographique)
- chaîne $--HDG (cap magnétique, déviation et variation magnétiques)
- chaîne $ --OSD (vecteur mouvement du bateau basé sur les capteurs et paramètres utilisés : cap vrai, route fond, vitesse du bateau, direction et vitesse de la dérive)
2.4.5 Compas satellitaires
Les chaînes position, cap vrai, mais aussi le tangage et roulis pour un meilleur calcul bathymétrique
2.4.5.1 Furuno SC-60
2.4.5.2 JRC JLR-10
2.4.5.3 Thalés Ashtech 3011
Note : lorsque le système Olex reçoit les informations issues d'un compas satellitaire, un nouvel item apparaît dans le menu Configurations : Voir tangage et roulis
2.4.6 Suivi de cibles surfaces
2.4.6.1 Radars ARPA
- chaîne $--TTM (donnée associée à la cible suivie relative à la position du navire)
2.4.6.2 Bouées
- chaîne $--TLL (numéro de cible, nom, position et heure)
2.4.6.3 Mobile aérien (hélicoptère)
- chaîne $--RMC (heure, date, position, cap et vitesse fournie par un récepteur de navigation GNSS)
2.4.6.4 Autres
- chaîne $--WPL (latitude et longitude du waypoint spécifié)